|
|
|
|
Motion
and Eddy current correction of diffusion weighted images.
To
correct for motion and/or eddy current artefacts in diffusion weighted data,
select the corresponding checkboxes in the Diffusion Analysis settings panel.
See here . Transformation
model
The
transformation model used in motion and eddy current correction of diffusion
weighted images is based on an article published in 2004 by G. K. Rohde et.
al. titled "Comprehensive
approach for correction of motion and distortion in diffusion-weighted
MRI". The optimization method however is based on another
article from 2001 by T. Netsch et. al. titled "Towards real-time multi-modality 3-D medical
image registration" , which uses local correlation as the cost function. The
user has the option to correct for motion and/or eddy current artefacts.
Motion can be described by a rigid body transformation, totally six
parameters. Eddy current artefacts appear in direction weighted images, and
distort the image data mainly along the y-axis, as shown in the article by
Rohde et. al. In that article the non-linear distortion was modelled by the
following equation:
In
our scheme we approximate the distortion by discarding all the second order
terms in the equation above. Note alsothat the
first coefficient in the equation is unnecessary if motion correction is
applied as well, because this parameter corresponds to translation along the
y-axis. If we also correct for motion, the total number of parameters is
nine. The approximation we have done allows us to describe the transformation
as
mapping
a voxel x' from the distorted diffusion weighted volume space to the
undistorted space of the reference volume. M is the rigid transformation
matrix, while D written out is
The
benefit of this choice of deformation transformation is the reduced
computation time. It has although been shown (Netsch & Muiswinkel, 2004) that comparing this transformation to
other more complex transformations does not show any statistically
significant difference in the results. Optimization
method
A Gauss
Newton optimization algorithm is used with the Local Correlation metric as the cost
function, as presented by Netsch et. al. This choice of cost function is what
allows us to express our optimization problem as a least squares problem, and
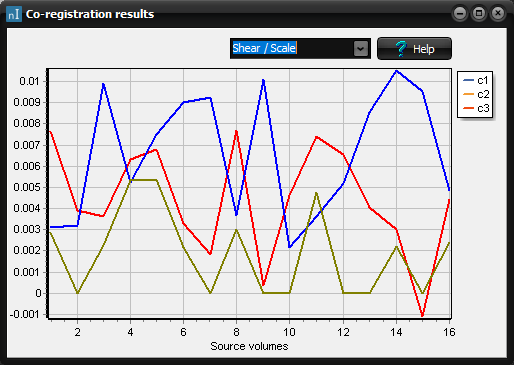
thus makes fast computations possible. View results
The
co-registration results are available through the DTI interaction panel once
the co-registration finishes. In the image above, the three graphs correspond
to the coefficients in the transformation model for all transformed volumes.
Results are also available for translation and rotation parameters as well,
given that motion correction is also applied. Related topics
Co-registration Module
|
|